,调制在38KHz 的载波上,然后经放大、驱动红外发射管将信号发射出去。不同公司的遥控芯片,采用的遥控码格式也不一样。较普遍的有两种,一种是NEC 标准,一种是PHILIPS 标准。</div>){kind=link}
单片机红外接收软件解码
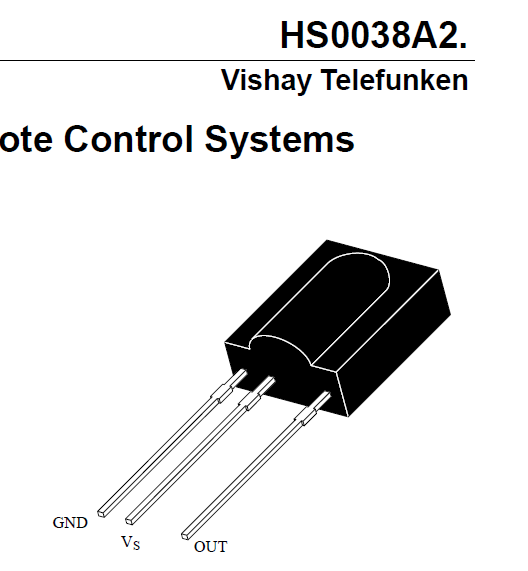
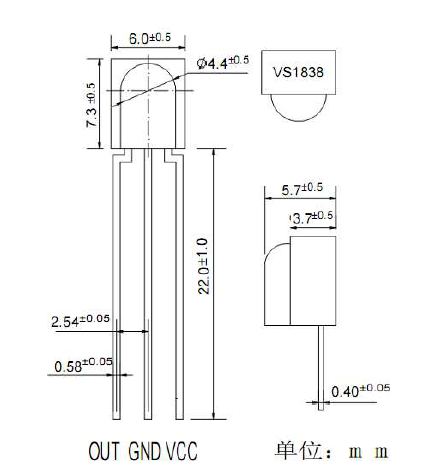
红外接收头的型号有很多 HS0038 VS838等 功能大致相同 只是引脚封装不同
HS0038 封装: VS838封装:
红外接收有几种统一的编码方式,采用哪种编码方式取决于遥控器使用的芯片,接收头接收到的都是一样的。
电视遥控器使用的是专用集成发射芯片来实现遥控码的发射,如东芝TC9012,飞利浦AA3010T 等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0 和1 组成的序列),调制在38KHz 的载波上,然后经放大、驱动红外发射管将信号发射出去。不同公司的遥控芯片,采用的遥控码格式也不一样。较普遍的有两种,一种是NEC 标准,一种是PHILIPS 标准。
NEC 标准:
遥控载波的频率为38KHz(占空比为1:3);当某个按键按下时,系统首先发射一个完整的全码,如果键按下超过108ms 仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
一个完整的全码=引导码+用户码+用户码+数据码+数据反码。
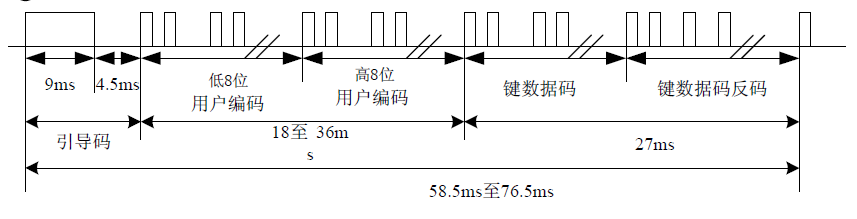
其中,引导码高电平9ms,低电平4.5ms;系统码8 位,数据码8 位,共32 位;其中前 16 位为用户识别码,能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。后 16 位为 8 位的操作码和 8 位的操作反码,用于核对数据是否接收准确。收端根据数据码做出应该执行什么动作的判断。连发代码是在持续按键时发送的码。它告知接收端,某键是在被连续地按着。
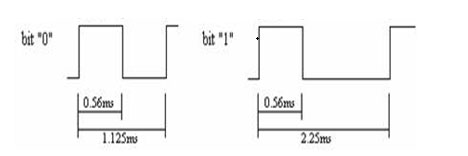
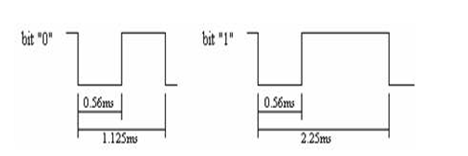
NEC 标准下的发射码表示
发射数据时0 用“0.56ms 高电平+0.565ms 低电平=1.125ms”表示;
数据1 用“高电平0.56ms+低电平1.69ms=2.25ms”表示。
遥控器发射的信号:
一体化接收头接收到的信号:
需要注意的是:当一体化接收头收到38kHz 红外信号时,输出端输出低电平,否则为高电平。所以一体化接收头输了的波形是与发射波形是反向的
PHILIPS 标准:
载波频率为38KHz;没有简码,点按键时,控制码在1 和0 之间切换,若持续按键,则控制码不变。
一个全码=起始码‘11’+控制码+用户码+用户码
数据0 用“低电平1.778ms+高电平1.778ms”表示;
数据1用“高电平1.778ms+低电平1.778ms”表示。
连续码重复延时114ms。(未验证)
所谓的解码就是一个区分脉冲宽度的过程。红外信号的0和1 是通过脉冲持续时间的长短来区分的。
我的遥控器使用的是NEC标准的WD6122芯片,遥控器编码如下:
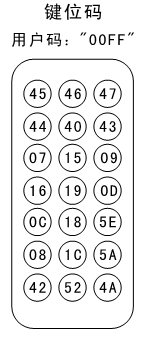
这里的用户码 是指接收到的用户码 即 第八位 为 00 高八位 为 FF
程序采用了状态机的思路,分为检测引导码,32位数据接收,连发码处理 三个状态。
还对用户码进行了校验,限定处理唯一用户码的遥控器的数据。对于反码也加入了验证。
检测程序如下:(程序使用11.0592Mhz晶振 不能使用12Mhz)
#include <reg52.h>
#include “lcd1602.h”
#define uchar unsigned char // 宏定义uchar 为无符号字符
#define uint unsigned int
#define IR_UserCode 0xFF00 //红外遥控器 用户码
uchar IR_Code[32] = {0};
uchar IR_User[16] = {0}; //用户码
uchar IR_Data[8] = {0}; //数据码
uchar IR_CData[8] = {0}; //数据反码
uchar key= ‘0’,value = 0; //key LCD显示值; value 接收头接收到值(16进制)
typedef enum
{
State_0 = 0x00,
State_1 = 0x01,
State_2 = 0x02
}ScanState_Typedef;
ScanState_Typedef ScanState;
void IR_Check(void);
void IR_CodeHandle(void);
void IR_Decode(void);
void delay(uint n);
void main()
{
LCD_Init();
LCD_WriteString(“The Key Is:”,1);
while(1){
IR_Check();
}
}
void IR_Check(void)
{
uchar i=0,n=0;
switch(ScanState)
{
case State_0 : //检测引导码
{
while(IR_DQ == 1);
delay(500);
if( IR_DQ == 0 )
{
while(IR_DQ == 0);
delay(300);
if(IR_DQ == 1)
{
ScanState = State_1;
while( IR_DQ == 1 );
}else{
ScanState = State_2; //为连发码
}
}else{
ScanState = State_0;
}
break;
}
case State_1: // 32位数据接收
{
while(i < 32){
while(IR_DQ == 0);
delay(60); //延时0.48ms
if(IR_DQ == 1)
IR_Code[i] = 0;
delay(28); //延时0.22ms,总延时0.70ms
if(IR_DQ == 1)
{
IR_Code[i] = 1;
while(IR_DQ == 1);
}else{
IR_Code[i] = 0;
}
i++;
}
IR_CodeHandle();
ScanState = State_0;
break;
}
case State_2: //连发码处理
{
while( IR_DQ == 0 );
ScanState = State_0;
break;
}
}
}
void IR_CodeHandle(void)
{
uchar n=0,check=0;
uint user = 0;
for(n=0;n<8;n++)
{
IR_User[n] = IR_Code[n]; //低位用户码
IR_User[8+n] = IR_Code[8+n]; //高位用户码
IR_Data[n] = IR_Code[16+n];
IR_CData[n] = IR_Code[24+n];
if(IR_Data[n] + IR_CData[n] == 0x01){ check++;} //反码检测,正数的原码和补码 各位相加后为 0x01
}
for(n=0;n<16;n++) //处理用户码
{
if(n==0)
{
user = IR_User[0];
}else{
user += IR_User[n] (2 << (n-1));
}
}
if((user == IR_UserCode) && (check == 8)) //用户码校验 反码校验
{
for(n=0;n<8;n++) //处理数据码,二进制转换为16进制
{
if(n==0)
{
value = IR_Data[0];
}else{
value += IR_Data[n] (2 << (n-1));
}
}
IR_Decode();
LCD_WriteByte(0xC7,0); //更新接收值
LCD_WriteByte(key,1);
}
}
void IR_Decode(void)
{
//P3 = value;
switch(value)
{
case 0x0D : key = ‘0’;break;
case 0x0C : key = ‘1’;break;
case 0x18 : key = ‘2’;break;
case 0x5E : key = ‘3’;break;
case 0x08 : key = ‘4’;break;
case 0x1C : key = ‘5’;break;
case 0x5A : key = ‘6’;break;
case 0x42 : key = ‘7’;break;
case 0x52 : key = ‘8’;break;
case 0x4A : key = ‘9’;break;
default : key= ‘?’;
}
}
void delay(uint n)
{
while(–n); // 8us一次
}
lcd1602.h 的程序见: LCD显示汉字 一文
效果图:
