和 直接操作寄存器的方法</div><div>直接操作寄存器的方法 会比库函数的方法效率更高 而且代码量会比较少 例如 在库函数下 配置一个GPIO口 需要 </div><div>GPIO_InitTypeDef GPIO_InitStructure; //结构体 初始化</div><div><div>GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;</div><div>GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;</div><div>GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; </div><div>GPIO_Init(GPIOA , &GPIO_InitStructure);</div><div> </div><div>五行代码 而直接操作寄存器只需要:</div><div> </div><div>RCC->APB2ENR|=1<<2; //使能PORTA时钟<span class="Apple-tab-span" style="white-space: pre; "></span> <span class="Apple-tab-span" style="white-space: pre; "></span></div><div><div>GPIOA->CRL&=0XFFF0FFFF; </div><div>GPIOA->CRL|=0X00030000;//PA4 推挽输出 <span class="Apple-tab-span" style="white-space:pre"></span></div><div> </div><div>三行代码 而且实际上这三行代码可以配置8个GPIO口 可以看出直接操作寄存器也是比较方便的</div><div>使用直接操作寄存器的方法操作stm32 环境配置和库函数类似 相关MDK设置可以参考 <a href="http://www.ichanging.org/mdk-stm32lib-set.html" target="_blank" rel="noopener">stm32 开发环境MDK+库文件配置</a> 直接操作寄存器需要的文件结构 会少得多 </div><div> </div><div><strong><span style="text-align: left; ">STM32 直接操作寄存器 keil工程结构</span></strong></div><div> </div><div><img src="/uploads/2012/07/2442186229.png" alt="base-list.png"><span style="text-align: left; ">Startup 包含的是stm32的 启动文件,与芯片Flash容量有关</span></div>
<p>Library 下有两个文件夹,src文件夹用于放置 标准外设库驱动源文件(<em>.c) 和 inc文件夹用于放置标准外设库驱动头文件(</em>.h)</p>
<p>User中包含的是项目的代码 和中断代码</p>
<p>Project 用于包含编译是时生成的一系列文件,Output 用来放置输出文件 .hex .axf,Listing用来放置Listing信息</p>
<p>需要说明的是 Startup里的启动文件需要根据不同的芯片选择不同的启动文件,这些启动文件在MDK的安装文件夹下可以找到 在MDK新建工程是选择了stm32的芯片型号后 MDK也会询问是否将启动文件添加到工程里 </p>
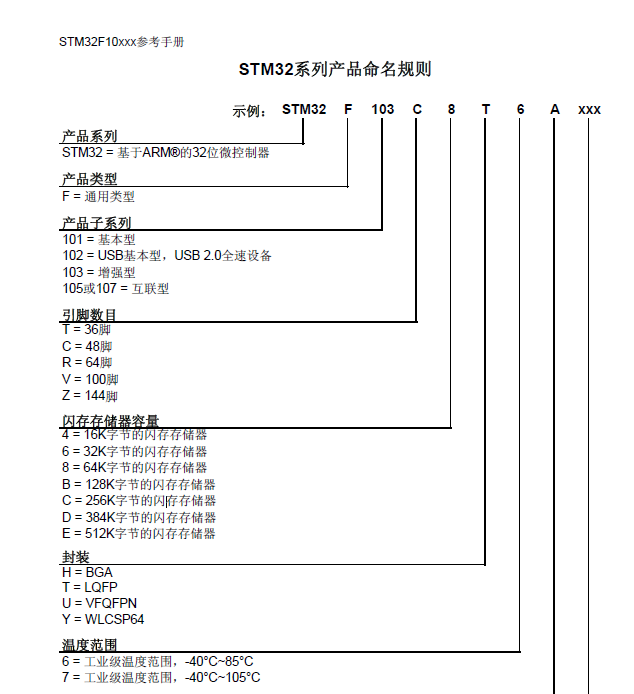
<p>在MDk安装路径\ARM\Startup\ST\STM32F10x的所有启动文件:<img src="/uploads/2012/06/310069959.png" alt="startup.png"></p>
<p><strong>小容量产品</strong>是指闪存存储器容量在16K至32K字节之间的STM32F101xx、STM32F102xx和STM32F103xx微控制器。 选择 startup_stm32f10x_ld.s。</p>
<p><strong>中容量产品</strong>是指闪存存储器容量在64K至128K字节之间的STM32F101xx、STM32F102xx和STM32F103xx微控制器。 选择 startup_stm32f10x_md.s。 </p>
<p><strong>大容量产品</strong>是指闪存存储器容量在256K至512K字节之间的STM32F101xx和STM32F103xx微控制器。 选择 startup_stm32f10x_hd.s。</p>){kind=link}
stm32 直接操作寄存器开发环境配置
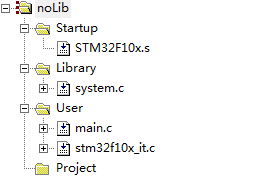 Startup 包含的是stm32的 启动文件,与芯片Flash容量有关
Startup 包含的是stm32的 启动文件,与芯片Flash容量有关Library 下有两个文件夹,src文件夹用于放置 标准外设库驱动源文件(.c) 和 inc文件夹用于放置标准外设库驱动头文件(.h)
User中包含的是项目的代码 和中断代码
Project 用于包含编译是时生成的一系列文件,Output 用来放置输出文件 .hex .axf,Listing用来放置Listing信息
需要说明的是 Startup里的启动文件需要根据不同的芯片选择不同的启动文件,这些启动文件在MDK的安装文件夹下可以找到 在MDK新建工程是选择了stm32的芯片型号后 MDK也会询问是否将启动文件添加到工程里
在MDk安装路径\ARM\Startup\ST\STM32F10x的所有启动文件:
小容量产品是指闪存存储器容量在16K至32K字节之间的STM32F101xx、STM32F102xx和STM32F103xx微控制器。 选择 startup_stm32f10x_ld.s。
中容量产品是指闪存存储器容量在64K至128K字节之间的STM32F101xx、STM32F102xx和STM32F103xx微控制器。 选择 startup_stm32f10x_md.s。
大容量产品是指闪存存储器容量在256K至512K字节之间的STM32F101xx和STM32F103xx微控制器。 选择 startup_stm32f10x_hd.s。
容量大小可以通过芯片型号得知:
还需要说明的一点是在 MDk安装路径\ARM\Startup\ST\下有一个 STM32F10x.s的启动文件
STM32F10x.s 可以作为大部分stm32型号的芯片的启动文件,但是并不能适用所有的STM32型号。
STM32F10x.s是MDK提供的启动代码,从其里面的内容看来,里面定义了STM32的堆栈大小以及各种
中断的名字及入口函数名称,还有启动相关的汇编代码。它只定义了3个串口,4个定时器。
实际上STM32的系列产品有5个串口的型号,也只有有2个串口的型号,定时器也是,做多的有8个定时
器。
比如,如果你用的STM32F103ZET6,而启动文件用的是STM32F10x.s的话,你可以正常使用串口
1~3的中断,而串口4和5的中断,则无法正常使用。又比如,你TIM1~4的中断可以正常使用,而5~8
的,则无法使用。
和库函数操作类似 直接操作寄存器方法也需要先配置RCC时钟 配置中断等操作 这里提供一个配置函数,后面的例子中都会调用这个文件)
Library/src/system.c
#include <stm32f10x_lib.h>
#include "system.h"
/**********************************************************
*
* 系统函数
*
* 功能:实现中断的初始化、RCC时钟初始化、Systick 初始化 以及 延时函数等
*
**********************************************************/
//设置向量表偏移地址
//NVIC_VectTab:基址
//Offset:偏移量
void Nvic_SetVectorTable(u32 NVIC_VectTab, u32 Offset)
{
//检查参数合法性
assert_param(IS_NVIC_VECTTAB(NVIC_VectTab));
assert_param(IS_NVIC_OFFSET(Offset));
SCB->VTOR = NVIC_VectTab|(Offset & (u32)0x1FFFFF80);//设置NVIC的向量表偏移寄存器
//用于标识向量表是在CODE区还是在RAM区
}
//设置NVIC分组
//NVIC_Group:NVIC分组 0~4 总共5组
void Nvic_PriorityGroupConfig(u8 NVIC_Group)
{
u32 temp,temp1;
//配置向量表
#ifdef VECT_TAB_RAM
Nvic_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else
Nvic_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
temp1=(~NVIC_Group)&0x07;//取后三位
temp1<<=8;
temp=SCB->AIRCR; //读取先前的设置
temp&=0X0000F8FF; //清空先前分组
temp|=0X05FA0000; //写入钥匙
temp|=temp1;
SCB->AIRCR=temp; //设置分组
}
//设置NVIC
//NVIC_PreemptionPriority:抢占优先级
//NVIC_SubPriority :响应优先级
//NVIC_Channel :中断编号
//NVIC_Group :中断分组 0~4
//注意优先级不能超过设定的组的范围!否则会有意想不到的错误
//组划分:
//组0:0位抢占优先级,4位响应优先级
//组1:1位抢占优先级,3位响应优先级
//组2:2位抢占优先级,2位响应优先级
//组3:3位抢占优先级,1位响应优先级
//组4:4位抢占优先级,0位响应优先级
//NVIC_SubPriority和NVIC_PreemptionPriority的原则是,数值越小,越优先
void Nvic_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group)
{
u32 temp;
u8 IPRADDR=NVIC_Channel/4; //每组只能存4个,得到组地址
u8 IPROFFSET=NVIC_Channel%4;//在组内的偏移
IPROFFSET=IPROFFSET*8+4; //得到偏移的确切位置
Nvic_PriorityGroupConfig(NVIC_Group);//设置分组
temp=NVIC_PreemptionPriority<<(4-NVIC_Group);
temp|=NVIC_SubPriority&(0x0f>>NVIC_Group);
temp&=0xf;//取低四位
if(NVIC_Channel<32)NVIC->ISER[0]|=1<<NVIC_Channel;//使能中断位(要清除的话,相反操作就OK)
else NVIC->ISER[1]|=1<<(NVIC_Channel-32);
NVIC->IPR[IPRADDR]|=temp<<IPROFFSET;//设置响应优先级和抢断优先级
}
//所有时钟寄存器复位
void Rcc_DeInit(void)
{
RCC->APB1RSTR = 0x00000000;//复位结束
RCC->APB2RSTR = 0x00000000;
RCC->AHBENR = 0x00000014; //睡眠模式闪存和SRAM时钟使能.其他关闭.
RCC->APB2ENR = 0x00000000; //外设时钟关闭.
RCC->APB1ENR = 0x00000000;
RCC->CR |= 0x00000001; //使能内部高速时钟HSION
RCC->CFGR &= 0xF8FF0000; //复位SW[1:0],HPRE[3:0],PPRE1[2:0],PPRE2[2:0],ADCPRE[1:0],MCO[2:0]
RCC->CR &= 0xFEF6FFFF; //复位HSEON,CSSON,PLLON
RCC->CR &= 0xFFFBFFFF; //复位HSEBYP
RCC->CFGR &= 0xFF80FFFF; //复位PLLSRC, PLLXTPRE, PLLMUL[3:0] and USBPRE
RCC->CIR = 0x00000000; //关闭所有中断
}
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
__asm void WFI_SET(void)
{
WFI;
}
//进入待机模式
void Sys_Standby(void)
{
SCB->SCR|=1<<2;//使能SLEEPDEEP位 (SYS->CTRL)
RCC->APB1ENR|=1<<28; //使能电源时钟
PWR->CSR|=1<<8; //设置WKUP用于唤醒
PWR->CR|=1<<2; //清除Wake-up 标志
PWR->CR|=1<<1; //PDDS置位
WFI_SET(); //执行WFI指令
}
//系统软复位
void Sys_Soft_Reset(void)
{
SCB->AIRCR =0X05FA0000|(u32)0x04;
}
//JTAG模式设置,用于设置JTAG的模式
//mode:jtag,swd模式设置;00,全使能;01,使能SWD;10,全关闭;
void JTAG_Set(u8 mode)
{
u32 temp;
temp=mode;
temp<<=25;
RCC->APB2ENR|=1<<0; //开启辅助时钟
AFIO->MAPR&=0XF8FFFFFF; //清除MAPR的[26:24]
AFIO->MAPR|=temp; //设置jtag模式
}
//系统时钟初始化函数
//pll:选择的倍频数,从2开始,最大值为16
void Rcc_Init(u8 PLL)
{
unsigned char temp=0;
Rcc_DeInit(); //复位并配置向量表
RCC->CR|=0x00010000; //外部高速时钟使能HSEON
while(!(RCC->CR>>17));//等待外部时钟就绪
RCC->CFGR=0X00000400; //APB1=DIV2;APB2=DIV1;AHB=DIV1;
PLL-=2;//抵消2个单位
RCC->CFGR|=PLL<<18; //设置PLL值 2~16
RCC->CFGR|=1<<16; //PLLSRC ON
FLASH->ACR|=0x32; //FLASH 2个延时周期
RCC->CR|=0x01000000; //PLLON
while(!(RCC->CR>>25));//等待PLL锁定
RCC->CFGR|=0x00000002;//PLL作为系统时钟
while(temp!=0x02) //等待PLL作为系统时钟设置成功
{
temp=RCC->CFGR>>2;
temp&=0x03;
}
}
//初始化化SysTick定时器
//无中断处理接口函数 SysTick_Handler(),待开发..
void SysTick_Init(u32 us)
{
u8 us_radix=72/8;//us延时倍乘数 SYSTICk的时钟固定为HCLK时钟的1/8,这里使用系统时钟72MHz
SysTick->CTRL&=0xfffffffb;//bit2清空,选择外部时钟 HCLK/8
SysTick->LOAD=us*us_radix; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL=0x01; //开始倒数
//SysTick->CTRL=0x00; //关闭计数器
//SysTick->VAL =0X00; //清空计数器
}
//延时函数
void delay(u32 us) //vu32 1us一次
{
u32 time=100*us/7;
while(--time);
}
Library/inc/system.h
#ifndef __SYS_H #define __SYS_H #include <stm32f10x_lib.h> //位带操作,实现51类似的GPIO控制功能 //具体实现思想,参考<<CM3权威指南>>第五章(87页~92页). //IO口操作宏定义 #define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2)) #define MEM_ADDR(addr) *((volatile unsigned long *)(addr)) #define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum)) //IO口地址映射 #define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C #define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C #define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C #define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C #define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C #define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C #define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C #define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808 #define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08 #define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008 #define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408 #define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808 #define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08 #define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08 //IO口操作,只对单一的IO口! //确保n的值小于16! #define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出 #define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出 #define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出 #define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出 #define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出 #define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入 #define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出 #define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入 #define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出 #define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入 ///////////////////////////////////////////////////////////////// //Ex_NVIC_Config专用定义 #define GPIO_A 0 #define GPIO_B 1 #define GPIO_C 2 #define GPIO_D 3 #define GPIO_E 4 #define GPIO_F 5 #define GPIO_G 6 #define FTIR 1 //下降沿触发 #define RTIR 2 //上升沿触发 ///////////////////////////////////////////////////////////////// //JTAG模式设置定义 #define JTAG_SWD_DISABLE 0X02 #define SWD_ENABLE 0X01 #define JTAG_SWD_ENABLE 0X00 ///////////////////////////////////////////////////////////////// void Rcc_Init(u8 PLL); //时钟初始化 void Sys_Soft_Reset(void); //系统软复位 void Sys_Standby(void); //待机模式 void Nvic_SetVectorTable(u32 NVIC_VectTab, u32 Offset);//设置偏移地址 void Nvic_PriorityGroupConfig(u8 NVIC_Group);//设置NVIC分组 void Nvic_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group);//设置中断 void JTAG_Set(u8 mode); void SysTick_Init(u32 us); void delay(u32 us); #endif
stm32中有很多中断处理接口函数,在User目录下新建一个文档,专门处理接口函数
User/stm32f10x_it.c:
#include "stm32f10x_it.h"
void USART1_IRQHandler(void)
{
... ...
}
User/stm32f10x_it.h
/******************** (C) COPYRIGHT 2008 STMicroelectronics ********************
* File Name : stm32f10x_it.h
* Author : MCD Application Team
* Version : V2.0.1
* Date : 06/13/2008
* Description : This file contains the headers of the interrupt handlers.
********************************************************************************
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
* AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
* INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
* CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
* INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*******************************************************************************/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __STM32F10x_IT_H
#define __STM32F10x_IT_H
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_lib.h"
/* Exported types ------------------------------------------------------------*/
/* Exported constants --------------------------------------------------------*/
/* Exported macro ------------------------------------------------------------*/
/* Exported functions ------------------------------------------------------- */
/*void NMI_Handler(void) __attribute__ ((alias("NMIException")));
void HardFault_Handler(void) __attribute__ ((alias("HardFaultException")));
void MemManage_Handler(void) __attribute__ ((alias("MemManageException")));
void BusFault_Handler(void) __attribute__ ((alias("BusFaultException")));
void UsageFault_Handler(void) __attribute__ ((alias("UsageFaultException")));
void DebugMon_Handler(void) __attribute__ ((alias("DebugMonitor")));
void SVC_Handler(void) __attribute__ ((alias("SVCHandler")));
void PendSV_Handler(void) __attribute__ ((alias("PendSVC")));
void SysTick_Handler(void) __attribute__ ((alias("SysTickHandler")));*/
void NMIException(void);
void HardFaultException(void);
void MemManageException(void);
void BusFaultException(void);
void UsageFaultException(void);
void DebugMonitor(void);
void SVCHandler(void);
void PendSVC(void);
void SysTickHandler(void);
void WWDG_IRQHandler(void);
void PVD_IRQHandler(void);
void TAMPER_IRQHandler(void);
void RTC_IRQHandler(void);
void FLASH_IRQHandler(void);
void RCC_IRQHandler(void);
void EXTI0_IRQHandler(void);
void EXTI1_IRQHandler(void);
void EXTI2_IRQHandler(void);
void EXTI3_IRQHandler(void);
void EXTI4_IRQHandler(void);
void DMA1_Channel1_IRQHandler(void);
void DMA1_Channel2_IRQHandler(void);
void DMA1_Channel3_IRQHandler(void);
void DMA1_Channel4_IRQHandler(void);
void DMA1_Channel5_IRQHandler(void);
void DMA1_Channel6_IRQHandler(void);
void DMA1_Channel7_IRQHandler(void);
void ADC1_2_IRQHandler(void);
void USB_HP_CAN_TX_IRQHandler(void);
void USB_LP_CAN_RX0_IRQHandler(void);
void CAN_RX1_IRQHandler(void);
void CAN_SCE_IRQHandler(void);
void EXTI9_5_IRQHandler(void);
void TIM1_BRK_IRQHandler(void);
void TIM1_UP_IRQHandler(void);
void TIM1_TRG_COM_IRQHandler(void);
void TIM1_CC_IRQHandler(void);
void TIM2_IRQHandler(void);
void TIM3_IRQHandler(void);
void TIM4_IRQHandler(void);
void I2C1_EV_IRQHandler(void);
void I2C1_ER_IRQHandler(void);
void I2C2_EV_IRQHandler(void);
void I2C2_ER_IRQHandler(void);
void SPI1_IRQHandler(void);
void SPI2_IRQHandler(void);
void USART1_IRQHandler(void);
void USART2_IRQHandler(void);
void USART3_IRQHandler(void);
void EXTI15_10_IRQHandler(void);
void RTCAlarm_IRQHandler(void);
void USBWakeUp_IRQHandler(void);
void TIM8_BRK_IRQHandler(void);
void TIM8_UP_IRQHandler(void);
void TIM8_TRG_COM_IRQHandler(void);
void TIM8_CC_IRQHandler(void);
void ADC3_IRQHandler(void);
void FSMC_IRQHandler(void);
void SDIO_IRQHandler(void);
void TIM5_IRQHandler(void);
void SPI3_IRQHandler(void);
void UART4_IRQHandler(void);
void UART5_IRQHandler(void);
void TIM6_IRQHandler(void);
void TIM7_IRQHandler(void);
void DMA2_Channel1_IRQHandler(void);
void DMA2_Channel2_IRQHandler(void);
void DMA2_Channel3_IRQHandler(void);
void DMA2_Channel4_5_IRQHandler(void);
#endif /* __STM32F10x_IT_H */
/******************* (C) COPYRIGHT 2008 STMicroelectronics *****END OF FILE****/
在User/main.c 中调用配置函数 就可以直接进行寄存器操作:
#include <stm32f10x_lib.h>
#include “stm32f10x_it.h”
#include “system.h”
int main(void) {
Rcc_Init(9); //系统时钟设置
delay(72); //延时初始化
while(1) {
.... ...
}
}